
小さなハエが、見えない手がかりを頼りに歩き回り、体に付いた汚れをこすり落とし、最後は食べ物にたどり着いて口を動かし始めます。
ここまで読むと、よくできたコンピューター映像の話のように感じるかもしれませんが、今回の映像はその中身がまったく違います。
2026年3月、米国の企業イーオン・システムズ(eon)は、この動きはただの作り物ではなく、「生き物の脳の配線をもとにして実際に動かしている」と強い言葉で発表しました。
同社はこれを、「脳を丸ごと計算の中で再現し、それに体を持たせたもの」と説明し、複数の行動を生み出す初めての例だと位置づけています。
ハエだからといって、この一歩の意味が軽くなるわけではありません。
これまで遠い未来の話に見えていた脳の再現というテーマが、急に目の前の実験として見える位置まで降りてきたのです。
アニメやマンガの中で描かれてきた「脳のコピーが仮想世界で動き続ける」という発想が、ついにハエという小さな生き物で現実に近づいた形です。
目次
- 脳の地図はどう作られたのか
- 脳モデルに「仮想の体」をつけたら何が起きた?
- 今の限界と見えてきたこと
- ハエの次はマウスへ!この技術はどこまで行けるのか?
脳の地図はどう作られたのか
この成果は、突然ひらめいて生まれたものではありません。
背景には、すでに進んでいた大規模な脳研究があります。
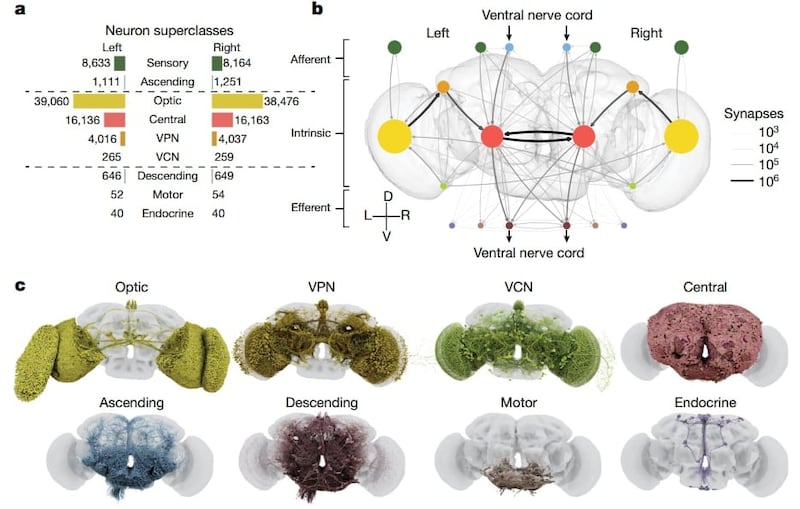
2024年、研究者たちはまず、ショウジョウバエの成体の脳について、ほぼすべての神経のつながりを調べ上げました。
その数は、13万9,255個の神経細胞と、5,450万のつながりにのぼります。
これは、成体の動物の脳としては、当時もっとも大きく、もっとも詳しい地図でした。
この作業は、想像以上に地道なものです。
顕微鏡で撮影された膨大な画像をもとに、どの神経がどこにつながっているのかを一つずつ確かめていきます。
人工知能の助けを借りながらも、最後は人間が確認する必要があり、膨大な手間がかかったとされています。
こうして完成したのが、いわば「脳の配線図」です。
https://pub-f0d016c1f8e442f9985c0032eac8cdb9.r2.dev/videos/blogpost-fly-video.mp4さらに同じ2024年には、この大きな資源を土台にして、別の段階の研究も進みました。
こちらは、脳の中心部分の詳しい接続情報などをもとにした脳全体の計算モデルで、12万5千を超える神経細胞と、5千万のつながりを使っています。
ここでは、神経の細かい形まで再現するのではなく、信号がどう流れるかに注目しています。
それでもこのモデルは、食べる行動や身づくろいに関わる神経活動や出力が、どのような信号の流れで生まれるかをかなりうまく予測できるまでになりました。
つまりこの時点で、研究者たちは「脳の地図」と「その地図を土台にした計算モデル」の両方を手に入れていたことになります。
ただし、ここにはまだ大きく欠けている部分がありました。
それは、体です。
脳モデルに「仮想の体」をつけたら何が起きた?
どれだけ脳の中で信号が走っても、それを受け取って動く体がなければ、外から見れば何も起きていないのと同じです。
例えるなら、頭の中で完璧に作戦を立てているのに、実際には一歩も動けない状態です。
そこで今回イーオンが行ったのは、この脳に仮想の体を与えることでした。
具体的には、コンピューターの中でハエが感じる刺激を再現し、それを脳モデルに伝えます。
脳はその情報を受け取ると、自分の配線図にしたがって体へ向かう信号を出します。
すると仮想空間のハエは実際に動き出し、歩いたり、身づくろいをしたり、食べたりという行動をとるようになります。
さらに面白いのは、その行動がまた新しい刺激として脳に戻ってくることです。
ハエが前に進めば周囲から入る刺激が変わり、体が汚れればその情報が感覚として脳に伝わります。
これにより、「感じる」「考える」「動く」「また感じる」という、生き物らしい行動の輪っかが完成します。
映像の中でハエが食べ物へ向かうのも、ただの演出ではありません。
甘い刺激が足や口に伝わった結果、脳の中で「食べる行動」を引き起こす信号が生まれます。
体にほこりがついたときに身づくろいをする動作も同じで、触角まわりに届いた感覚が身づくろいの回路を刺激しています。
会社の技術説明によると、この循環は千分の十五秒ごとに細かく繰り返されているといいます。
仮想世界のハエが滑らかに動いて見えるのも、この速いやりとりが裏側で続いているおかげなのです。
https://pub-f0d016c1f8e442f9985c0032eac8cdb9.r2.dev/videos/andregg-fly-video.mp4これまで脳と体をつなげた研究自体は、他にもいろいろありましたが、多くの場合はあらかじめ人間が「こう動いてね」と教えたり、人工知能に「強化学習」という方法で学ばせたりしたものでした。
いわば、動きの裏付けが人工知能ベースで、生物の実際の脳の配線そのものには直接依存しないものでした。
しかし今回の実験では、あくまで「本物のハエの脳の配線図」を中核に信号を体を動かす制御の仕組みへ渡す形でした。
そのためイーオンは「これはちょっとした改良ではなく、質的にまったく違うレベルに達した」と位置づけています。
仮想の体も、いわゆる「それっぽい動き」の人形ではありません。
イーオンの技術解説では、公開済みの身体モデル「ニューロメックフライ」を土台にし、ハエの体を精密な三次元モデルとして作り、87の関節が独立に動くとしています。
動かす舞台には、物理シミュレーション環境「ムジョコ」が使われています。
つまり、足が床を押せば反作用が返り、摩擦が足取りを左右し、姿勢が崩れれば転びます。
脳からの合図が、こうした物理法則の制約を受けるところまで再現したわけです。